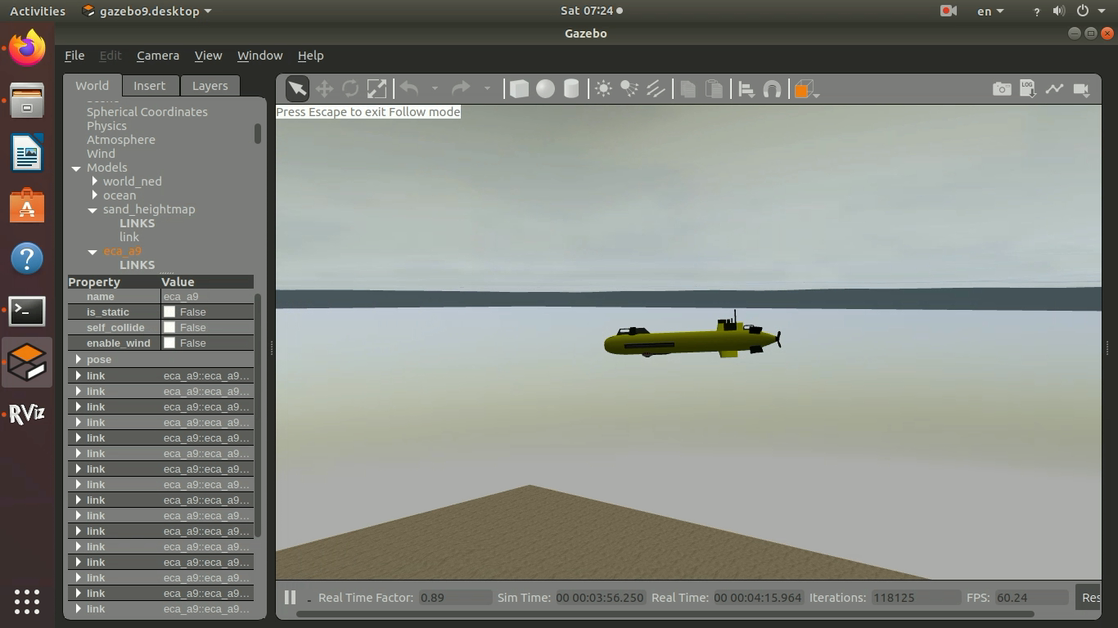
در این پروژه نحوه راهاندازی و اجرای شبیه ساز UUV_Simulator برای شبیه سازی وسایل بدون سرنشین زیر سطحی آموزش داده میشود.
این پروژه شامل مجموعه ای از بسته ها شامل پلاگین ها و برنامه های ROS است که امکان شبیه سازی وسایل نقلیه زیر آب را در Gazebo فراهم می کند.


مدلسازی و کنترل بازوی ۲ درجه آزادی
خرداد 17, 1400اطلاعات مربوط به این پروژه
شبیه سازی ربات زیرسطحی(AUV)
در این پروژه نحوه راهاندازی و اجرای شبیه ساز UUV_Simulator برای شبیه سازی وسایل بدون سرنشین زیر سطحی آموزش داده میشود.
مدلسازی و کنترل بازوی ۲ درجه آزادی
در این پروژه مدلسازی و کنترل یک بازوی رباتیک ساده دو درجه آزادی را در ROS آموزش داده می شود. با انجام این پروژه شما می توانید رباتهای شخصی خودتان را نیز در رآس مدلسازی و کنترل کنید.
شبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo
در این پروژه به معرفی و شبیه سازیشبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo پرداخته میشود. کاربردهای اصلی این حسگر را می توان در سیستمهای خودمختار، توسعه الگوریتم ها برای پردازش داده های لیدار، استفاده از ابر نقاط و یا به عنوان بخشی از الگوریتم های پیشرفته خودمختاری SLAM (مکان یابی و نقشه کشی همزمان ) یافت.
راهاندازی ربات پرنده در ROS
در این پروژه نحوه راهاندازی و کنترل یک کوادکوپتر در ROS آموزش داده خواهد شد.
{kind=link}
{kind=link}
3 دیدگاه
با سلام لطفا داده ها و فایل های آموزشی ربات زیر سطحی رو قرار بدید ممنون از تیم ایران راس
سلام دوست عزیز
از اینکه با ایران رآس همراه هستی بسیار خشنودیم
در حال تهیه یک دوره آموزشی هستیم انشالله به زودی بارگذاری می شود.
سلام و روز بخیر دوره آموزشی خیلی عالیه. لطف میکنید. ان شالله هر چه زودتر آماده بشه کاستفاده کنیم.