




Motion Planning
Manipulation
Inv Kinematics
Control

Collision Check
3D Perception
moveit چیست؟
moveIt راهی برای کنترل بازوهای روباتیک (بازوهای صنعتی یا روبات های انسان نما) است. Moveit یکی از اولین برنامه های کاربردی در ROS برای کاربردهای رباتهای صنعتی است! البته ربات های صنعتی مبتنی بر برنامه ریزی مسیر. در اصل ، این تنها کاری است که آنها باید انجام دهند.اما از این بسته قدرتمند می توان برای یافتن و تولید مسیرهای سه بعدی برای سیستمهایی که دارای بازوهای رباتیک نیستند مانند هواپیماهای بدون سرنشین و کوادکوپترها نیز استفاده کرد. از آنجا که هواپیماهای بدون سرنشین باید در یک محیط سه بعدی حرکت کنند ضمن اینکه از برخورد با موانع موجود در راه خود جلوگیری می کنند. داشتن یک برنامه تولید شده توسط MoveIt استفاده از آن را بسیار آسان تر می کند. اما از آنجایی که وقتی MoveIt ارائه شد. اولین کاربرد آن برای رباتهای صنعتی بود. این امر منجر به ایجاد کنسرسیوم صنعتی ROS شده است.
MoveIt پرکاربردترین نرم افزار برای بازوهای رباتیکی است و در بیش از ۱۲۶ ربات استفاده شده است. این نرم افزار یک بستر آسان برای استفاده در زمینه رباتیک را برای توسعه برنامههای پیشرفته ، ارزیابی طرحهای جدید و ساخت محصولات یکپارچه برای صنعت ، تجارت ، تحقیق و توسعه و سایر حوزه ها فراهم میکند. MoveIt با استفاده از جدیدترین پیشرفتهای مربوط به برنامهریزی حرکت، بازوهای رباتیکی، درک سهبعدی، سینماتیک، کنترل و پیمایش، یک نرم افزار حرفهای برای بازوهای رباتیکی خودمختار است.
چرا MoveIt !
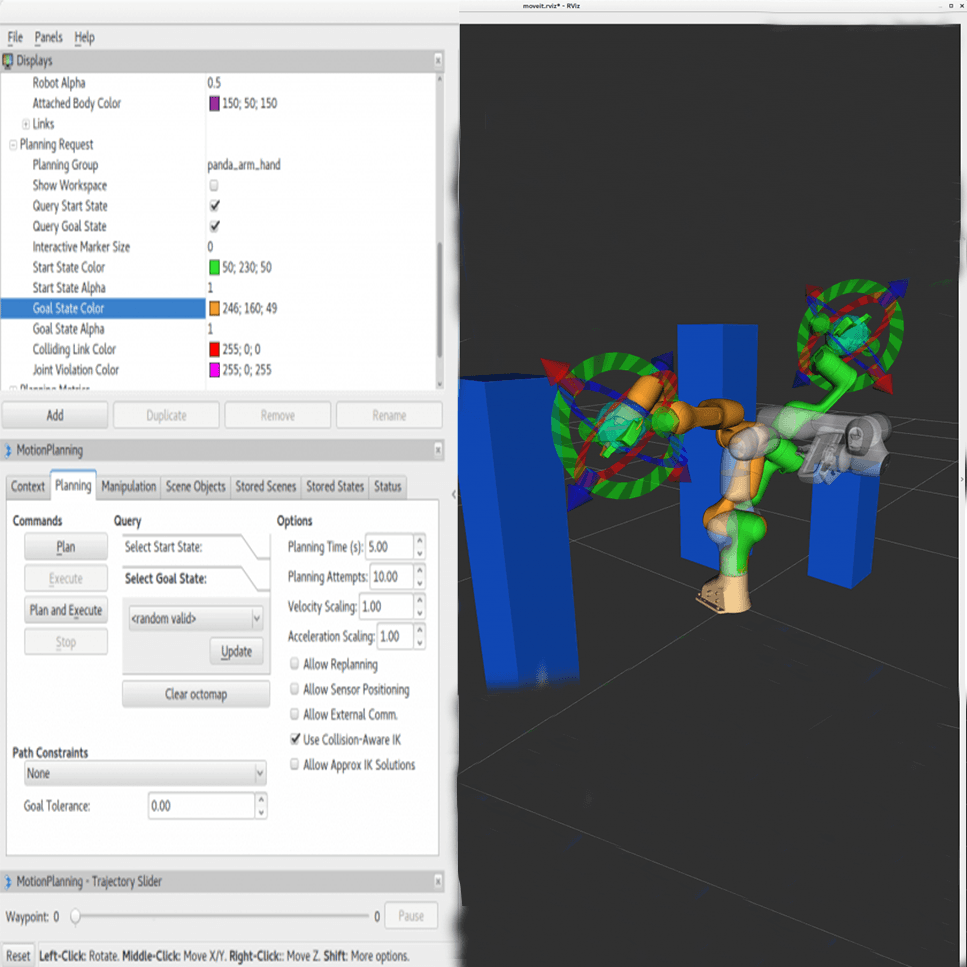
نمایش برخورد
از طریق کد نمونه ++C به شما امکان می دهد هنگام حرکت و تعامل با بازوی ربات در RViz ، نقاط تماس برخورد بین ربات و محیط اطراف آن را مشاهده کنید.
شبیهساز Gazebo
با MoveIt چرخه های توسعه و آزمایش را سرعت ببخشید. Gazebo ROS Control و MoveIt را برای یک پلت فرم قدرتمند جهت توسعه روباتیک ترکیب کنید.

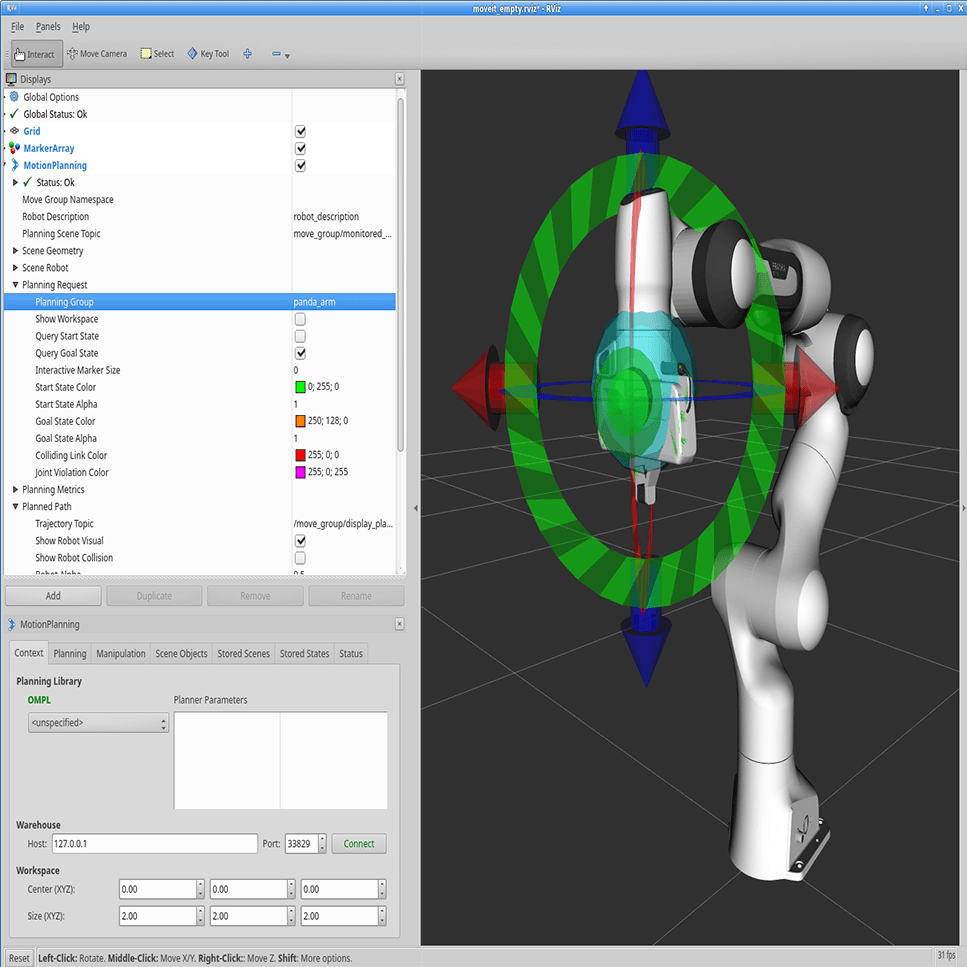
دارای پلاگین طراحی مسیر برای Rviz
قابلیت استفاده از پلاگین برای مبتدیان ، جهت کمک به یادگیری آسان و سریع انواع الگوریتمهای طراحی مسیر برای گریز از موانع تنها با یک کلیک !!!

یک رابط کاربری گرافیکی برای پیکربندی هر ربات جهت استفاده از MoveIt وجود دارد. وظیفه اصلی این رابط گرافیکی تولید یک فایل SRDF برای روبات شما است. علاوه بر این ، فایل های پیکربندی لازم دیگری را برای استفاده از MoveIt ایجاد می کند!