

پروژه های کاربردی و آموزشی در سیستم عامل رباتیک ROS

پروژه آموزشی turtlesim_iranmap
این پروژه بر اساس آموزشهای مقدماتی ارائه شده در دانشنامه ایران رآس مهیا شده است و در آن لاکپشت شبیهساز turtlesim مسیر مرزهای ایران را طی کرده و ردی از حرکت خود باقی میگذارد.

راهاندازی ربات پرنده در ROS
در این پروژه نحوه راهاندازی و کنترل یک کوادکوپتر در ROS آموزش داده خواهد شد.
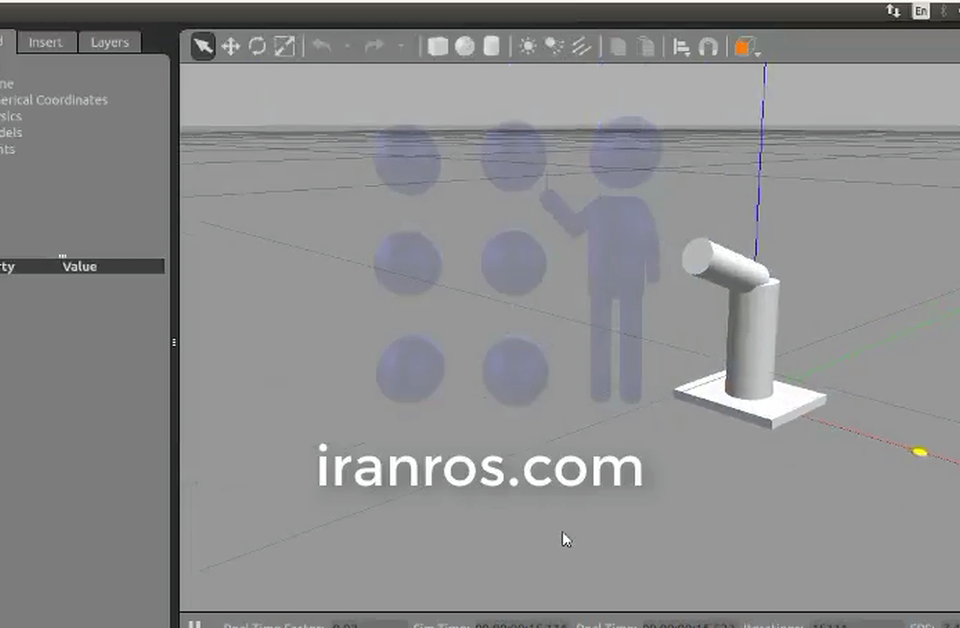
مدلسازی و کنترل بازوی ۲ درجه آزادی
در این پروژه مدلسازی و کنترل یک بازوی رباتیک ساده دو درجه آزادی را در ROS آموزش داده می شود. با انجام این پروژه شما می توانید رباتهای شخصی خودتان را نیز در رآس مدلسازی و کنترل کنید.
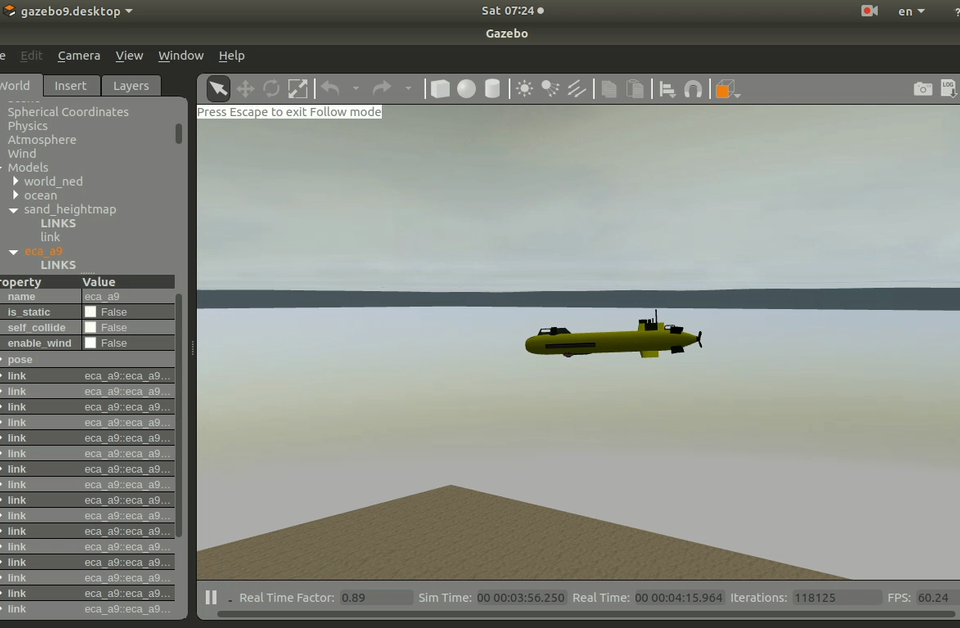
شبیه سازی ربات زیرسطحی(AUV)
در این پروژه نحوه راهاندازی و اجرای شبیه ساز UUV_Simulator برای شبیه سازی وسایل بدون سرنشین زیر سطحی آموزش داده میشود.

شبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo
در این پروژه به معرفی و شبیه سازیشبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo پرداخته میشود. کاربردهای اصلی این حسگر را می توان در سیستمهای خودمختار، توسعه الگوریتم ها برای پردازش داده های لیدار، استفاده از ابر نقاط و یا به عنوان بخشی از الگوریتم های پیشرفته خودمختاری SLAM (مکان یابی و نقشه کشی همزمان ) یافت.
همه پروژهها
شبیه سازی ربات زیرسطحی(AUV)
در این پروژه نحوه راهاندازی و اجرای شبیه ساز UUV_Simulator برای شبیه سازی وسایل بدون سرنشین زیر سطحی آموزش داده میشود.
مدلسازی و کنترل بازوی ۲ درجه آزادی
در این پروژه مدلسازی و کنترل یک بازوی رباتیک ساده دو درجه آزادی را در ROS آموزش داده می شود. با انجام این پروژه شما می توانید رباتهای شخصی خودتان را نیز در رآس مدلسازی و کنترل کنید.
شبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo
در این پروژه به معرفی و شبیه سازیشبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo پرداخته میشود. کاربردهای اصلی این حسگر را می توان در سیستمهای خودمختار، توسعه الگوریتم ها برای پردازش داده های لیدار، استفاده از ابر نقاط و یا به عنوان بخشی از الگوریتم های پیشرفته خودمختاری SLAM (مکان یابی و نقشه کشی همزمان ) یافت.

راهاندازی ربات پرنده در ROS
در این پروژه نحوه راهاندازی و کنترل یک کوادکوپتر در ROS آموزش داده خواهد شد.

پروژه آموزشی turtlesim_iranmap
این پروژه بر اساس آموزشهای مقدماتی ارائه شده در دانشنامه ایران رآس مهیا شده است و در آن لاکپشت شبیهساز turtlesim مسیر مرزهای ایران را طی کرده و ردی از حرکت خود باقی میگذارد.