
شبیهسازی حسگر Velodyne LIDAR در ROS و Gazebo جهت استفاده در کاربردهای صنعتی امری حیاتی است. در این پروژه کوچک به معرفی و شبیه سازی این حسگر ( سنسور ) در گزبو – رآس پرداخته میشود. کاربردهای اصلی این حسگر را می توان در سیستمهای خودمختار، توسعه الگوریتم ها برای پردازش داده های لیدار، استفاده از ابر نقاط و یا به عنوان بخشی از الگوریتم های پیشرفته خودمختاری SLAM (مکان یابی و نقشه کشی همزمان ) یافت.


مدلسازی و کنترل بازوی ۲ درجه آزادی
خرداد 17, 1400مقدمهای بر LIDAR
سیستم های مبتنی بر LiDAR برای نقشه برداری داخلی و خارجی ابزاری کاملاً جدید در جامعه جغرافیایی نیستند. اما در سال های اخیر ، فناوری LiDAR (Light Detection And Ranging) در زمینه رباتیک، هوش مصنوعی، زمین سنجی (geodesy) و زمینههای مرتبط بسیار رایج شده است. عموما از این تکنولوژی زمانی که در دسترس بودن مدل های سه بعدی از محیط های بیرونی یا سرپوشیده داخلی می تواند سودمند باشد، استفاده میشود.
نصب و راه اندازی
به منظور استفاده از حسگر Velodyne LIDAR باید بسته های باینری مربوط به آن را بر روی سیستم عامل خود نصب و یا با استفاده از سورس کد ارائه شده کامپایل نمایید. از این رو در ادامه از طریق یکی از روش های زیر بسته ای موجود را نصب نمایید.
نصب از طریق بسته های باینری (روش ساده)
راه حل ساده استفاده از دستور زیر برای نصب باینری بسته های مربوط به Velodyne LIDAR بر روی توزیع Kinetic نرم افزار ROS است.
[sourcecode language=”plain”]
sudo apt-get install ros-kinetic-velodyne-simulator
[/sourcecode]
نکته: جهت نصب بر روی سایز توزیع ها کافی است که نام توزیع مورد نظر خود را بجای Kinetic بنویسید و دستور بالا را در کامند لاین وارد نمایید.
نصب از طریق سورس کد
به منظور نصب بسته ها از طریق سورس کد نیاز است تا ابتدا مخزن مربوط به سورس کدهای برنامه را در سیستم عامل خود به کمک دستور زیر clone نمایید.
[sourcecode language=”plain”]
git clone https://bitbucket.org/DataspeedInc/velodyne_simulator.git
[/sourcecode]
بعد از اینکه بسته مورد نظر را در فضای کار خود Clone کردید. با کمک دستور Catkin_make بیلد نمایید.
اجرای شبیهسازی حسگر Velodyne LIDAR در Gazebo
بعد از نصب بسته نوبت به اجرای یک مثال ساده میرسه. برای این منظور ابتدا هسته راس را با دستور roscore اجرا نمایید و در ترمینال جدید دستور زیر را در ترمینال خود وارد نمایید.
[sourcecode language=”plain”]
roslaunch velodyne_description example.launch
[/sourcecode]
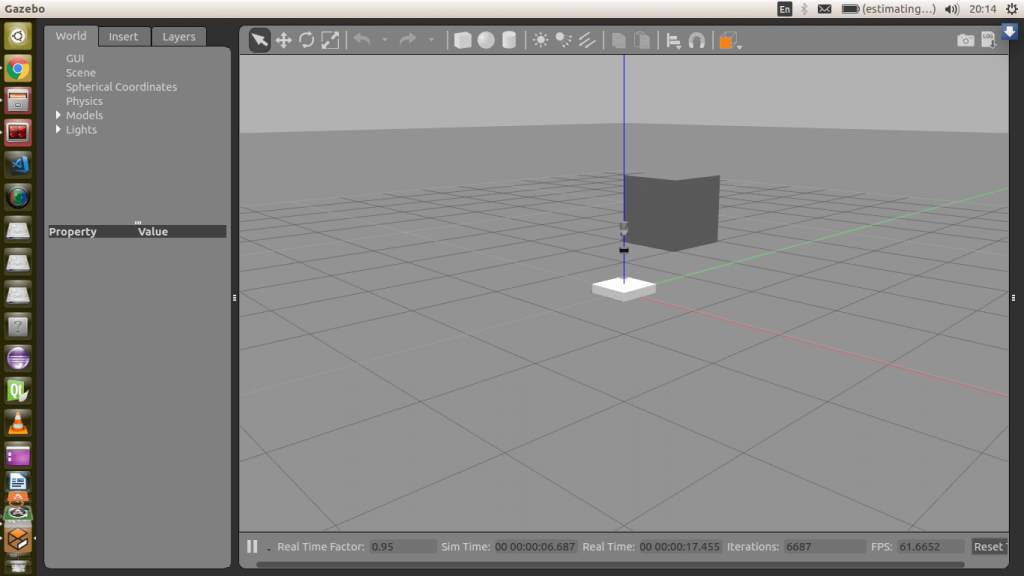
دستور بالا یک حسگر را در محیط Gazebo لانچ می کند.
توجه: این شبیه سازی نیازمند حافظه RAM بالا است. سیستم شما باید برای اجرای دستور بالا حداقل ۸GB RAM در اختیار داشته باشد.
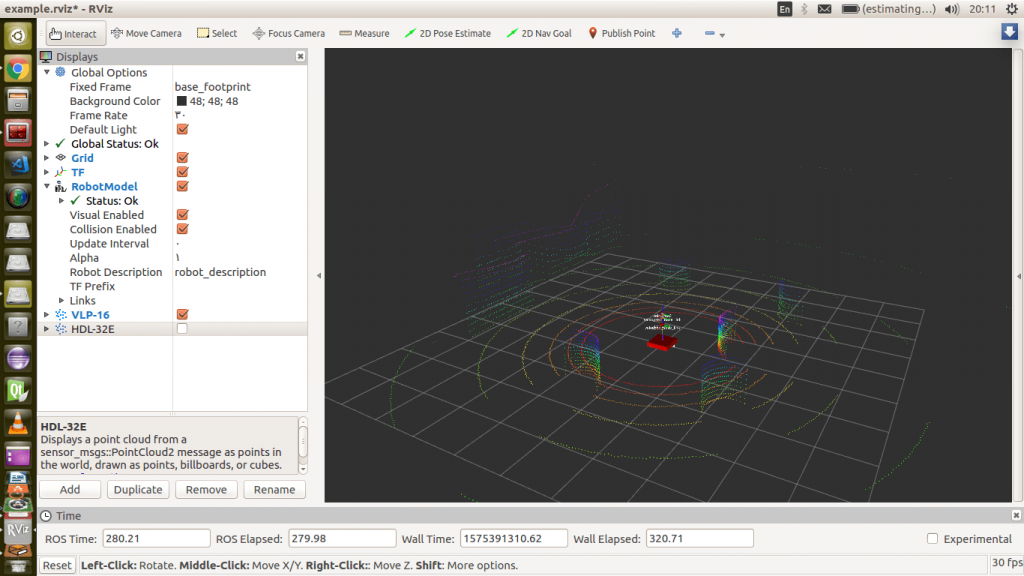
به راحتی می توانید یکسری مانع در محیط مطابق تصویر زیر قرار دهید.
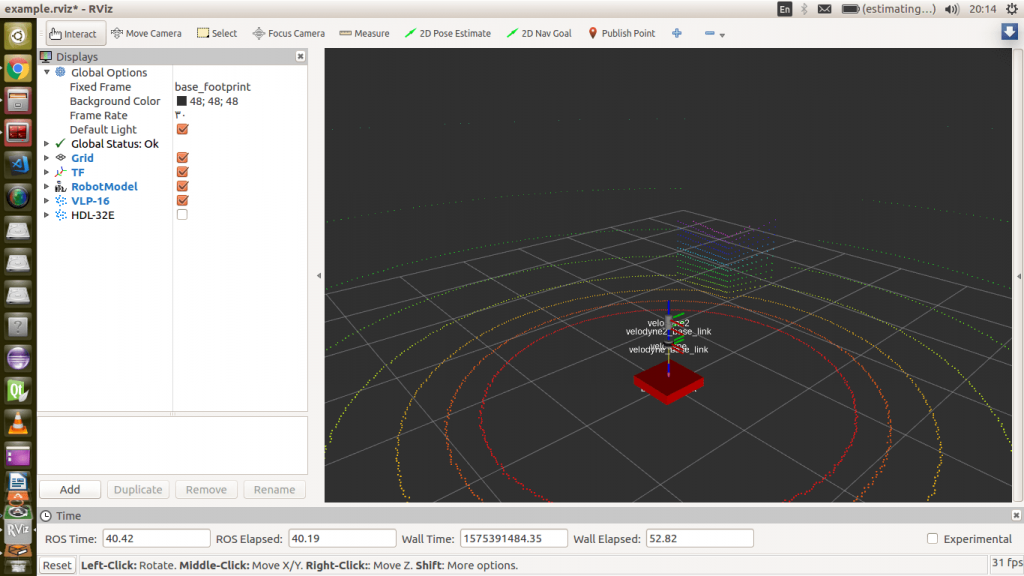
به صورت پیشفرض شما باید در نمایشگر سه بعدی دادههای حسگر لیدار و موانع را مشاهده نمایید در غیر این صورت، به منظور نمایش دادهها و مدل این حسگر در نمایشگر سه بعدی Rviz تایپهای PointCloud2 و Robot Model را باید اضافه نمایید. دقت شود که Fixed Frame را به Velodyne تنظیم نمایید. در این صورت باید مطابق شکل زیر داده های حسگر و موانع را مشاهده نمایید.
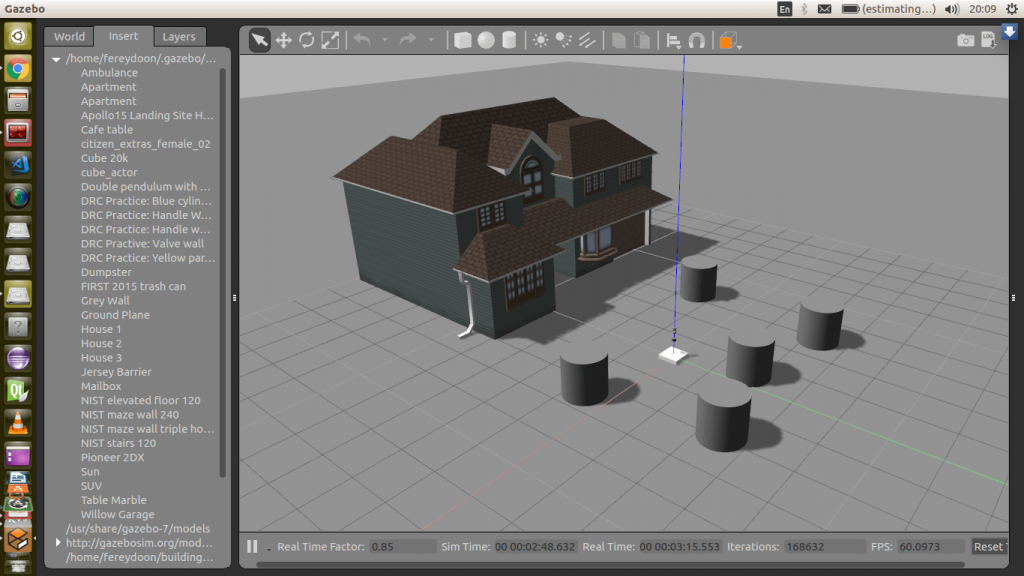
همچنین می توانید مدلهای دیگر در محیط گزبو مطابق شکل زیر اضافه نمایید.
{kind=link}
{kind=link}