


اکثر محققان در تلاش هستند تا رباتهای خود را برای حل کارهای جالب و پیچیده برنامه ریزی کنند اما حرکت ربات ها در محیط بدون برخورد با اجسام مساله بسیار پیچیدهای است. پژوهشگری به نام Konidaris امیدوار است که رباتهای آینده شروع هیجان انگیزتری در این زمینه داشته باشند. دلیلش این است که تقریباً چهار سال پیش که استارت آپ Realtime Robotics را به منظور حل “مشکل برنامه ریزی حرکت (motion planning problem)” و در واقع حذف محدودیت ربات در محیط تاسیس کرد.
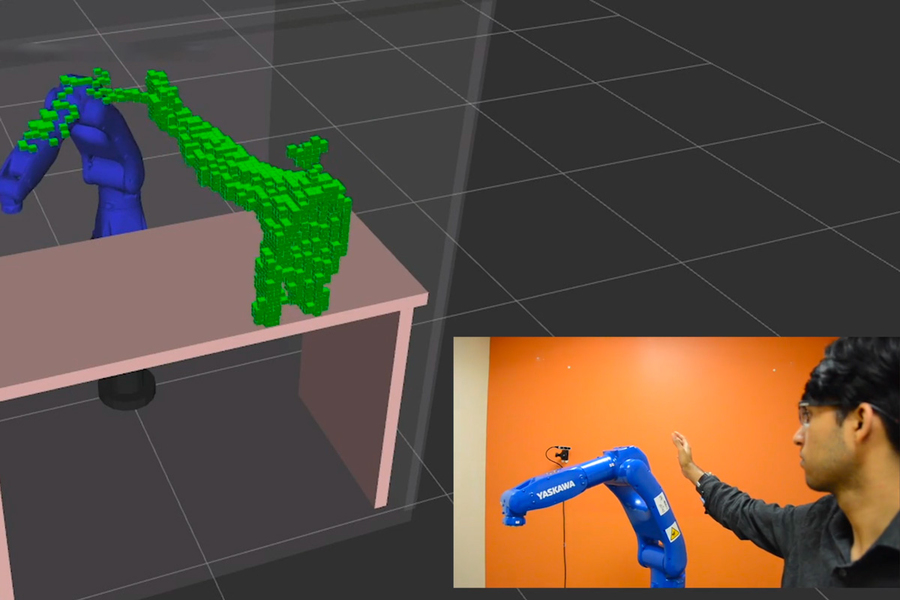
این شرکت یک راه حل جدید را ارائه کرده که به روباتها این امکان را میدهد تا خیلی سریع مسیر خود را طراحی کنند تا در حین حرکت به سمت هدف از برخورد با اشیا در محیط جلوگیری کنند. کنترلر Realtime جعبهای است که میتواند به انواع رباتها متصل شود و در محیطهای پویا مستقر شود.
کمک به ربات ها برای حرکت در محیط
Konidaris اولین کسی نبود که از مسئله برنامهریزی حرکت در رباتیک دلسرد شده بود. محققان این حوزه ۴۰ سال است که روی آن کار می کنند. طی چهار سال پسا دکتری در دانشگاه MIT ، Konidaris با استاد دانشکده مهندسی در تعالی آموزش عالی Tomas Lozano-Perez ، پیشگام در این زمینه که مقالاتی را درباره برنامه ریزی حرکت قبل از تولد Konidaris منتشر می کرد، کار کرد.
انسان اجتناب از برخورد را امری مسلم می داند. Konidaris اشاره می کند که عمل سادهی برداشتن آب سرد از یخچال در واقع نیاز به یک سری کارها مانند باز کردن یخچال ، قرار دادن بدن برای رسیدن به آن ، اجتناب از اجسام دیگر در یخچال و تصمیم گیری برای گرفتن قوطی آب دارد.
Konidaris می گوید: “شما در واقع باید بیش از یک پلن را محاسبه کنید.” “شما ممکن است نیاز به محاسبه صدها برنامه برای عملیاتی که می خواهید داشته باشید. … عجیب است که ساده ترین کارهایی که انسان صدها بار در روز انجام می دهد در واقع به محاسبات بسیار زیادی احتیاج دارد.”
در رباتیک ، مشکل برنامه ریزی حرکتی حول توان محاسباتی مورد نیاز برای انجام آزمایش های مکرر همزمان با حرکت رباتها در فضا می چرخد. در هر مرحله از یک مسیر برنامه ریزی شده ، آزمایشات کمک می کند تا تعیین کنید که آیا حرکت های مختلف باعث می شود ربات با اجسام اطرافش برخورد کند یا خیر. چنین آزمایشاتی محققان را به فکر انداختن الگوریتمهای پیچیدهتری در سالهای اخیر ترغیب کرده است ، اما کونیداریس معتقد است که این روش اشتباه است.
حذف محدودیت های ربات
امروزه اکثر مشتریان استارت آپ Realtime در صنعت خودرو ، تولید و تدارکات هستند. رباتها با استفاده از راه حل ارائه شده توسط استارت آپ Realtime در حال انجام همه کارها هستند ، از جوشکاری نقطه ای تا بازرسی و برداشتن وسایل از سطل های زباله.
هنگامی که ربات فعال و در حال کار است ، جعبه Realtime’s حرکت آن را کنترل می کند و به آن قابلیت های جلوگیری از برخورد سریع را می دهد.
مرجع: اخبار دانشگاه MIT

{kind=link}